IB-Robot系列 | 具身Claw:具身智能OS的大小脑协同具身智能体
一、背景
2025年,具身智能首次被写入中国《政府工作报告》,成为国家重点培育的未来产业。然而,具身机器人从实验室到产业化的跨越并非坦途。机器人行业长期面临 "系统割裂、实时性不足、开发门槛高" 三大困局——感知决策与运动控制分属不同芯片或系统,造成系统割裂;通信协作过程中产生系统级延迟,难以满足实时性要求;开发者需掌握 ROS/ROS2、运动控制、深度学习等多领域知识,环境搭建复杂、调试周期长,形成高开发门槛。
具身智能OS应运而生。
在OpenAtom openEuler(简称 “openEuler” 或 “开源欧拉”)社区刚刚发布的 openEuler Embedded 26.03 新版本中,成功孵化了 具身智能OS全栈技术 —— IB-Robot,为开发者、行业伙伴提供从底层硬件到上层算法的全链路端到端解决方案。作为面向具身智能场景深度优化的操作系统,openEuler 构建了完整的具身智能OS技术底座,实现感知、决策、控制的深度融合与高效协同。
具身Claw 作为 具身智能OS(IB-Robot 框架)成功打造的大小脑协同具身智能体,通过"大脑-协同层-小脑"三层异构计算架构,实现从高层认知到低层控制的端到端贯通,为具身智能的产业化落地提供可复用的技术范式。。
二、现状与挑战
构建面向具身智能场景的深度优化操作系统,需要直面机器人产业化过程中的核心难题。当前,具身智能OS的发展主要面临以下三大挑战:
2.1 易用性挑战
开发者门槛高: 传统机器人开发需要开发者同时掌握 ROS/ROS2、运动控制、深度学习、嵌入式系统等多领域知识。环境搭建复杂,涉及数十个依赖库的版本兼容问题;调试周期长,从代码修改到真机验证往往需要数小时甚至数天;算法迭代效率低,每次调整都需要重新编译、部署、测试。
更关键的是,不同机器人硬件平台(机械臂、人形、四足、AGV)的接口差异巨大,开发者需要为每种平台重复开发适配代码,造成严重的资源浪费。
用户上手难: 机器人产品往往需要专业工程师进行现场部署和参数调优,普通用户难以直接使用。即使完成部署,机器人的任务泛化能力极差——换一个场景、换一个物体,就需要重新编程或大量人工示教。用户期望的"开箱即用"体验与现实的"专业调试"需求之间存在巨大鸿沟。
2.2 数据采集挑战:高质量数据是模型训练的"燃料"
具身机器人的数据采集是公认的行业难题。目前主流的数据采集方式包括:
- 人工示教:操作员手把手引导机器人完成动作,每小时仅能采集数百条数据,成本高昂且效率极低
- 遥控操作:通过手柄或VR设备远程控制机器人,虽然可以采集更多数据,但操作员疲劳度高,数据质量参差不齐
- 仿真生成:在虚拟环境中生成数据,但仿真与真实世界存在"域差异",直接迁移效果不佳
核心挑战体现在三个层面:
| 挑战维度 | 具体问题 |
|---|---|
| 采集效率 | 人工示教占研发总成本 40% 以上,数据产出速度远低于模型训练需求 |
| 数据质量 | 如何筛选冗余数据、剔除无效样本、保证数据分布的多样性 |
| 规模构建 | 如何自动化构建大规模数据集,并实现有侧重的训练优化 |
以抓取任务为例,训练一个泛化能力良好的抓取模型通常需要数万条不同物体、不同姿态、不同光照条件下的数据,传统方式下完成这一数据采集需要数周甚至数月时间。
2.3 长程任务挑战:从"单点技能"到"复杂协作"
技术难点剖析:
真实场景中的任务往往是长程、多步骤的。以"整理房间"为例,机器人需要依次完成:识别散落物品 → 分类判断 → 导航移动 → 精准抓取 → 搬运至指定位置 → 正确放置。这对机器人的综合能力提出了极高要求。
长程任务的核心挑战包括:
场景感知与语义理解:如何基于多模态传感器融合,准确识别环境中的物体类别、理解空间拓扑关系、追踪动态状态变化
任务分解与高层规划:如何将抽象的自然语言指令转化为可执行的行为原语序列,处理任务间的依赖关系与约束条件
任务调度与资源分配:如何根据任务优先级、计算资源占用、机器人实时状态进行动态调度,实现多目标优化
多智能体协同与分布式协调:多机器人场景下,如何实现跨本体的状态同步、意图共享与智能协作,避免冲突与死锁
技能抽象与行为原语组合:如何设计通用的原子技能库,定义标准接口与组合规则,实现技能间的无缝衔接与复用
运动控制与执行稳定性:如何在长程执行过程中保持动作的连贯性,处理外部扰动与不确定性,实现平滑稳定的轨迹跟踪
更困难的是,长程任务执行过程中随时可能出现意外情况——物体滑落、路径被阻挡、传感器噪声——机器人需要具备实时感知、动态重规划、自主纠偏的能力,这对系统的实时性和鲁棒性提出了严苛要求。
三、具身Claw架构概述
为应对上述三大挑战,具身智能OS融合 Intelligence BooM 软件栈 的全链路能力,以 具身Claw 为载体构建"大脑-协同层-小脑"三层异构计算架构,具体融合设计方案如下:
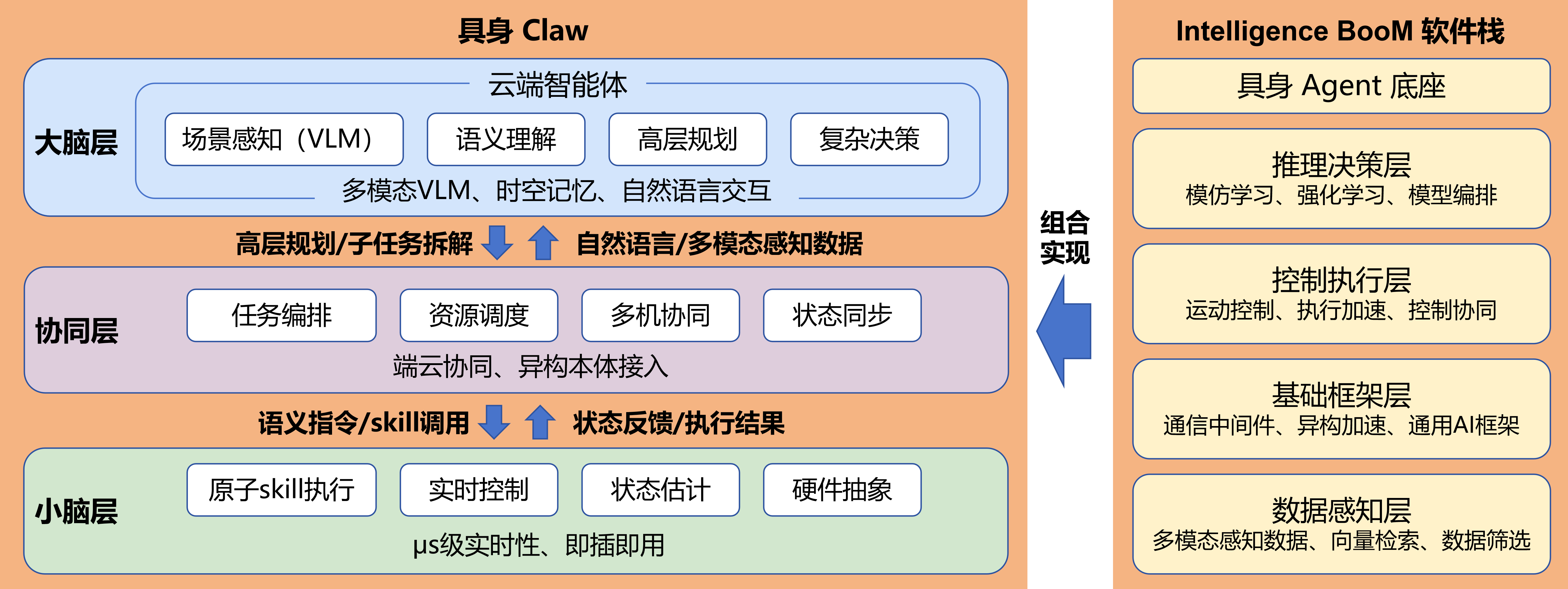 图:具身 Claw 三层架构
图:具身 Claw 三层架构
具身claw 各层间数据流转与能力调用 方式如下:
- 下行链路:大脑层调用推理决策层完成高层规划,将子任务拆解结果传递至协同层;协同层依托基础框架层转换为语义指令与 Skill 调用,下发至小脑层;小脑层借助控制执行层完成精准控制
- 上行链路:小脑层将状态反馈与执行结果回传协同层,数据感知层实时采集多模态数据;协同层整合自然语言与感知数据上报大脑层,形成闭环
为此,具身智能OS进一步提供完整的 Intelligence BooM 软件栈支撑,包括具身 Agent 底座(AI 机器人框架支撑多模型编排)、推理决策层(具身模仿学习/强化学习框架)、控制执行层(运动控制、执行加速、控制协同)、基础框架层(通信中间件、异构加速、通用 AI 框架)及数据感知层(多模态感知数据、向量数据库、数据筛选),形成从底层到上层的全链路能力覆盖。具身Claw作为这一融合架构的典型实现,通过组合调用 Intelligence BooM 软件栈的各层能力,构建完整的具身智能体功能。
核心特性:一站式开发工具链覆盖全生命周期、Sim2Real 无缝切换、支持机械臂/人形/四足/AGV 等多本体兼容、深度融合 ROS2/LeRobot 开源生态。
四、具身Claw关键技术与应用
具身Claw 作为具身智能OS的大小脑协同具身智能体,为底层OS构建自然语言交互、自动化数据飞轮、长程任务执行等上层应用能力。两者协同形成"底层OS底座 + 上层智能体应用"的完整技术栈,共同应对具身智能产业化过程中的易用性、数据采集与长程任务三大核心挑战。
4.1 易用性提升:自然语言驱动的低代码开发
具身Claw 基于具身智能OS的底层能力,深度集成 Coding Agent,开发者可通过自然语言描述需求,系统自动完成代码生成、编译运行、代码评审与策略迭代,构建完善的 Harness Engineering 体系。
关键能力:
| 能力 | 说明 | 效果 |
|---|---|---|
| 自然语言交互 | 开发者用日常语言描述需求,系统自动解析并生成代码框架 | 开发效率提升 10 倍 |
| 即插即用驱动 | 预装主流传感器与执行器驱动,南向硬件零配置接入 | 硬件适配时间从数天缩短至数分钟 |
| 可视化运维 | 提供图形化仿真界面,零代码完成机器人配置、状态监控、任务管理 | 用户上手门槛大幅降低 |
| 全算力覆盖 | 支持高算力中央控制器与资源受限边缘平台 | 一套代码多端部署 |
价值:
- 开发者:无需掌握 ROS/ROS2、运动控制等底层知识,专注算法与业务创新
- 用户:开箱即用,任务泛化性与自主性显著提升,换一个场景无需重新编程
4.2 数据采集优化:基于 Tool/Skill 的自动化数据飞轮
具身Claw 依托具身智能OS的数据管理能力,构建基于大模型 Agent 的 Skill/Tool 体系,实现自动化数据采集闭环。
在大模型 Agent 架构中,Skill 与 Tool 是两个核心概念:
- Skill(技能):Agent 的"能力/策略",是 Agent 内置的决策逻辑和行为模式,可以以此规范数据飞轮中的行为。
- Tool(工具):Agent 可调用的"外部工具/接口",是 Agent 与外部控制的桥梁。
具身Claw 的数据飞轮通过 Agent 调用 Skill 进行决策、调用 Tool 执行操作来实现自动化数据采集闭环。
 图:具身Claw 基于 Agent Skill/Tool 的数据飞轮闭环
图:具身Claw 基于 Agent Skill/Tool 的数据飞轮闭环
数据飞轮运转流程:
| 环节 | 技术实现 | 效果 |
|---|---|---|
| 真实场景探索 | 基于好奇心/目标驱动在真实环境中自主探索 | 发现新物体与新任务场景 |
| 自动化数据采集 | 标准化接口同步记录视觉、力觉、关节状态等多模态数据 | 人工时间成本降低 |
| 智能数据筛选 | 基于世界模型预测与离线 GRPO 后训练,自动评估数据质量 | 冗余数据减少 |
| 原子策略训练 | 将复杂任务拆解为原子动作,独立训练 Policy 模型 | 数据复用率提升 |
| 模型部署验证 | 部署至真实机器人,收集执行反馈持续优化 | 数据飞轮闭环 |
关键技术细节:
- 自主探索机制:Agent 基于好奇心驱动,优先探索未知区域与新物体,最大化信息增益
- 在线学习优化:通过强化学习机制,从执行反馈中持续优化策略,采集更高质量数据
- 多模态同步:RGB 图像、点云、关节角度、力觉反馈、语音指令多通道同步记录
4.3 长程任务执行:记忆管理与多维度调度
具身Claw 基于具身智能OS构建长程任务执行架构,在完整的任务执行流程中融入记忆管理系统、多维度约束调度、统一资源抽象三大核心能力,实现复杂长程任务的持续执行与动态纠偏。
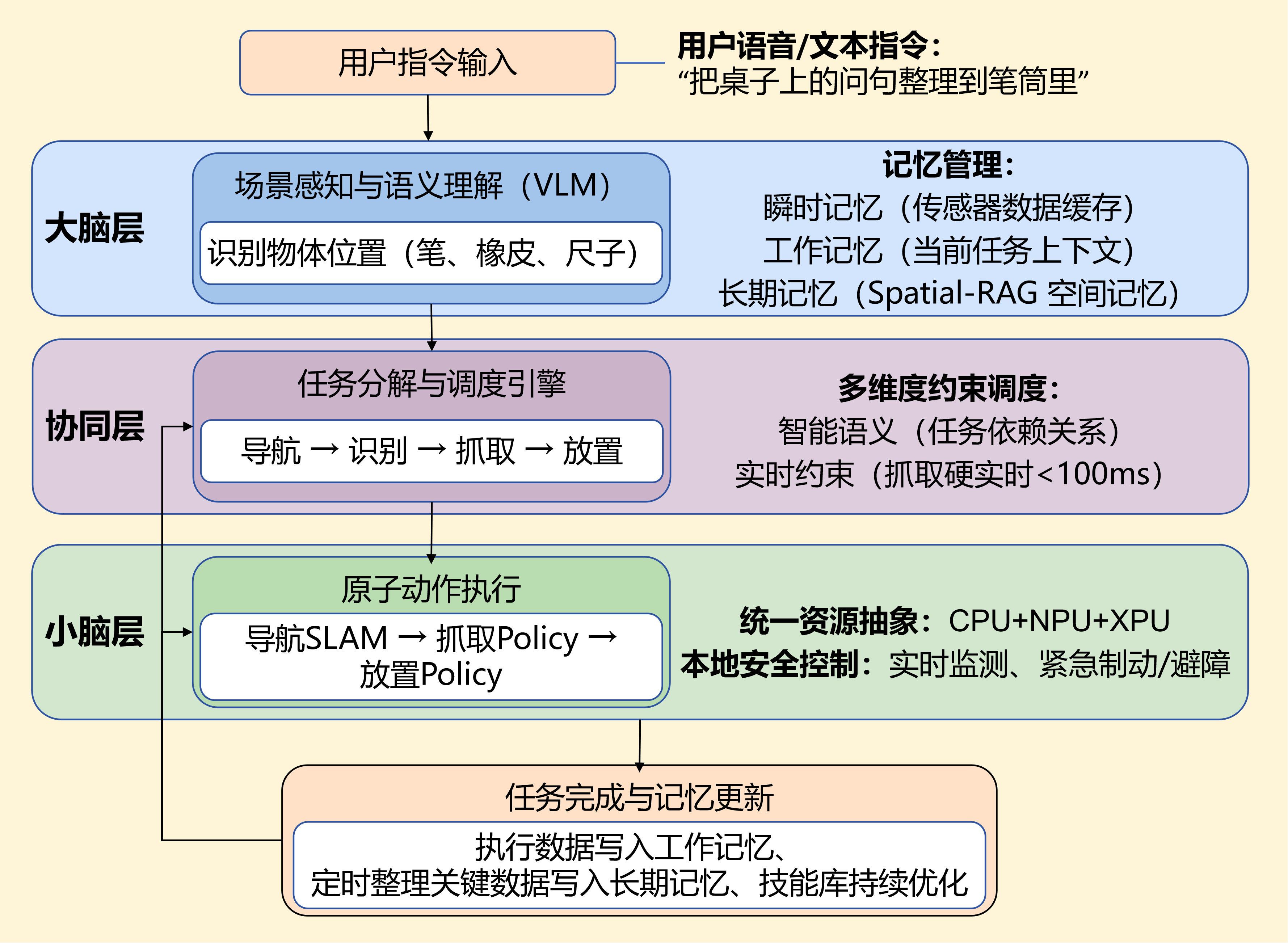 图:具身Claw 长程任务执行架构
图:具身Claw 长程任务执行架构
如上图所示,具身Claw 的任务执行流程分为三层:
大脑层:接收用户指令后,通过 VLM 进行场景感知与语义理解,调用 GPU 进行视觉推理,识别物体位置。此过程中,记忆管理系统发挥作用——瞬时记忆缓存传感器数据,工作记忆维护当前任务上下文。
协同层:任务分解与调度引擎将长程指令拆解为原子动作序列(导航→识别→抓取→放置)。此过程中,多维度约束调度综合考虑:
- 智能语义约束:任务间的依赖关系与优先级
- 实时约束:抓取动作设定硬实时 deadline(如100ms)
小脑层:原子技能执行阶段,通过 统一资源抽象 调用异构计算资源——导航SLAM(CPU)、抓取Policy(NPU)、控制执行(CPU),开发者无需关心底层硬件差异。
记忆更新:任务完成后,执行数据写入长期记忆,技能库持续优化,支持下次任务复用。
关键技术支撑:
| 能力 | 说明 |
|---|---|
| 记忆管理 | 瞬时记忆(传感器缓存)→ 工作记忆(任务上下文)→ 长期记忆(SpatialRAG空间记忆) |
| 多维度调度 | 智能语义 + 实时约束的多维调度优化 |
| 资源抽象 | CPU/GPU/NPU 统一接口,自动异构调度与负载均衡 |
| 本地安全机制 | 小脑实时监测执行状态,遇紧急情况立即触发制动或避障 |
| 技能持续优化 | 执行数据回传至小脑训练模块,实现原子技能的本地迭代升级 |
| 多机协同记忆 | 通过共享大脑层部分记忆,在协同层进行多机记忆交互,实现跨本体状态同步与智能协作 |
五、具身Claw典型应用场景
5.1 桌面整理场景
场景描述:用户通过自然语言指令让机器人完成桌面整理任务——识别散落物品、分类归纳、精准抓取并放置到指定收纳区域。
应用方案:
- 大脑:接收自然语言指令("把桌上的文具整理到笔筒里"),通过 VLM 识别桌面物品(笔、橡皮、尺子)和空间位置,拆解为识别→分类→抓取→放置序列
- 协同层:具身智能OS根据物品优先级和桌面空间状态,动态规划抓取顺序
- 小脑层:具身智能OS控制机械臂实现精准抓取,实时调整姿态避免碰倒其他物品
- 数据采集:自动化采集桌面场景下的抓取数据,训练桌面整理专用 Policy
- 应用效果:桌面整理任务成功率达 90%,平均完成时间 3 分钟
5.2 服务场景:Lekivi 小车+机械臂抓取物体
场景描述:Lekivi 移动机器人平台搭载机械臂,完成指定区域内的物体识别与抓取任务。
应用方案:
- 跨本体协作:具身智能OS实现"1 大脑 + N 小脑"架构,云端统一规划,端侧各机器人并行执行
- 动态调度:具身智能OS根据任务优先级、机器人状态实时调整任务分配
- 应用效果:全流程成功率超 90%,指令响应延迟低于 10ms
六、未来展望:迈向群体智能的新纪元
6.1 技术演进路线
具身Claw 依托具身智能OS的发展分为三个递进阶段,与各关键技术模块紧密呼应:
| 阶段 | 状态 | 核心内容 |
|---|---|---|
| 阶段一:基础框架与易用性建设 | ✅ 已实现 | 完成大小脑协同架构、运行时调度、资源管理、通信中间件等核心模块开发;实现自然语言驱动的低代码开发、即插即用驱动、可视化运维;支持 ROS2/LeRobot 生态融合;验证机械臂、AGV 等多本体可移植性 |
| 阶段二:数据采集与智能引擎完善 | 🔄 进行中 | 构建基于 Tool/Skill 的自动化数据采集体系;持续优化 VLA、V-JEPA 等主流模型接入能力;提升低延迟资源调度性能;完善 Sim2Real 迁移工具链;实现数据飞轮闭环运转 |
| 阶段三:长程任务能力与生态建设 | 📋 规划中 | 完善记忆管理系统(瞬时/工作/长期记忆);深化多维度约束调度(智能语义、算力资源、实时约束);强化统一资源抽象(CPU/GPU/NPU);上线技能商店,支持原子技能组合与版本管理;构建开发者社区 |
6.2 生态共建愿景
具身智能OS秉承开源开放理念,诚邀产业伙伴共建生态:
- 硬件厂商:接入更多传感器、执行器、机器人本体,实现"即插即用"
- 算法开发者:贡献原子技能、VLA 模型、仿真环境,丰富技能库
- 行业用户:提供真实场景需求与数据反馈,推动技术迭代
6.3 终极目标:让机器人真正"理解"世界
我们相信,具身智能的终极形态不是单一技能的堆砌,而是具备通用认知能力、能够自主学习与进化、可与人类自然协作的智能体。
具身Claw 依托具身智能OS构建的大小脑协同架构,正是通向这一愿景的关键路径:
"大脑"负责理解世界,"小脑"负责精准执行,协同让机器人从"能动"走向"能想",最终"边思考边干活"。
具身智能OS将持续演进,为具身智能产业提供坚实的技术底座,推动机器人从实验室走向千行百业,真正服务于人类社会。
七、相关链接
开源代码仓库:
https://gitcode.com/openeuler/IB_Robot.git
文档与教程:






