kata shimV2中监控容器退出机制的实现方案分析
当前shim有shimV1和shimV2两种实现架构,shimV1作为传统shim的实现方案,主要被用作容器引擎和runtime的中间层,实现io、signals等的转发;最新版本的shimV2,在shimV1的基础上集成了runtime的功能,缩短了容器创建的调用链, 在某些场景能够有效降低底噪开销。在本文中的shimV2 默认使用的是containerd-shim-kata-v2,以此为分析对象,分别分析了iSulad和containerd中对pause和container(业务容器)两种类型的容器退出监控流程的实现方式。
shimV2介绍
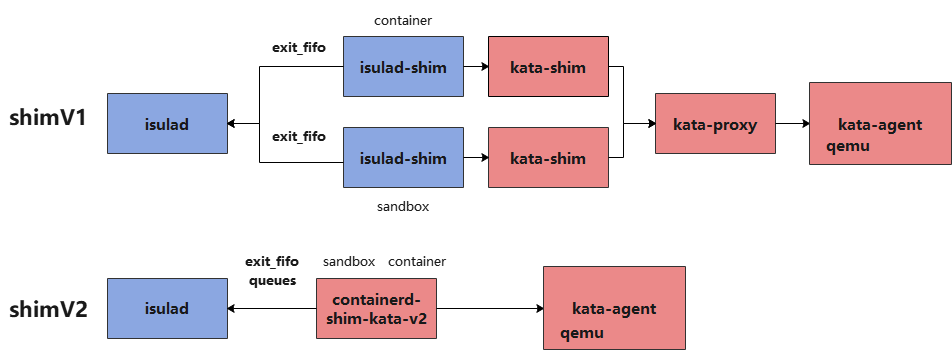
在shimV1架构中,安全容器的启动涉及kata-shim、 kata-runtime、 kata-proxy、kata-agent组件以及用于创建虚机的qemu组件。在shimV2架构中,将shim、proxy和runtime集成到一个二进制中,当启动pause容器和在pause中启动业务容器时,host os中只存在一个containerd-shim-kata-v2进程和qemu-kvm进程,也就是说pause容器和其中的业务容器共用同一个containerd-shim-kata-v2进程和虚拟机。shimV2和shimV1架构对比如下。shimV1在单pause+多业务容器场景,每启动一个pause或者业务容器都有一个containerd-shim或者isulad-shim、kata-shim进程被拉起,pause和其中的业务容器共用kata-proxy(非vsock)进程和虚机进程(2N+1)。然而, shimV2在单pause+多业务容器场景中,host os中只有一个containerd-shim-kata-v2进程和qemu-kvm进程,调用链更短, 总体底噪更低,特别是当pause中业务容器数量增加时,低底噪优势将更加明显。
![]()
iSulad与shimV1和shimV2关系
iSulad中shimv1的实现
isulad-shim组件作为iSulad中shimv1的实现方案,代码在iSulad仓库中,随iSulad一起编译安装;可用于对接不同的OCI Runtime, 如runc、kata-runtime.
iSulad中shimv2的实现
当前iSulad对接shimv2仍处于调试阶段,shimV2分为containerd-shim-kata-v2和containerd-shim-runc-v2两种实现,本文以containerd-shim-kata-v2作为对象,分析在shimv2场景下,安全容器的退出监控实现机制。
shimv1和shimv2的区别如下图所示
iSulad中容器退出监控剖析
以isulad-shim为例,iSulad中通过epoll机制监控每个isulad-shim进程中开启的exit_fifo fd是否关闭,isulad-shim在监控到容器退出后将其退出码写入此fifo, 在iSulad中读取并设置容器退出状态,业务容器和pause容器均会打开一个exit_fifo fd。对于pause容器和业务容器这两种CRI流程的容器会分别拉起独立的isulad-shim进程。
iSulad | <==> isulad-shim <==> container init
iSulad | <==> isulad-shim <==> pause init
iSulad中在start 容器流程中开启exit_fifo的读端fd并加入epoll监控, 关键代码如下:
int do_start_container(container_t *cont, const char *console_fifos[], bool reset_rm, pid_ppid_info_t *pid_info)
{
runtime_start();
do_post_start_on_success() {
container_supervisor_add_exit_monitor() {
supervisor_handler_lock();
epoll_loop_add_handler();
}
}
}containerd中容器退出监控
containerd在启动容器并监控其退出状态时不再使用fifo来实现而是使用rpc调用中的Wait方法, 启动pause容器、业务容器以及调用容器exec命令时,均会在containerd中开启一个协程来获取其退出状态。containerd重启后,connect方法实现将全部容器的wait方法进行重建。
- start sandbox和start container监控流程
代码文件:containerd/vendor/github.com/containerd/cri/pkg/server/events.go
// eventMonitor monitors containerd event and updates internal state correspondingly.
// TODO(random-liu): Handle event for each container in a separate goroutine.
type eventMonitor struct {
c *criService
ch <-chan *events.Envelope
// exitCh receives container/sandbox exit events from exit monitors.
exitCh chan *eventtypes.TaskExit
errCh <-chan error
ctx context.Context
cancel context.CancelFunc
backOff *backOff
}
// container 监控退出
func (c *criService) StartContainer(ctx context.Context, r *runtime.StartContainerRequest) (retRes *runtime.StartContainerResponse, retErr error) {
// wait is a long running background request, no timeout needed. //ght container这里监听
exitCh, err := task.Wait(ctrdutil.NamespacedContext())
// start the monitor after updating container state, this ensures that
// event monitor receives the TaskExit event and update container state
// after this.
c.eventMonitor.startExitMonitor(context.Background(), id, task.Pid(), exitCh)
}
// RunPodSandbox creates and starts a pod-level sandbox. Runtimes should ensure
// the sandbox is in ready state.
func (c *criService) RunPodSandbox(ctx context.Context, r *runtime.RunPodSandboxRequest) (_ *runtime.RunPodSandboxResponse, retErr error) {
// wait is a long running background request, no timeout needed.
exitCh, err := task.Wait(ctrdutil.NamespacedContext())
// start the monitor after adding sandbox into the store, this ensures
// that sandbox is in the store, when event monitor receives the TaskExit event.
//
// TaskOOM from containerd may come before sandbox is added to store,
// but we don't care about sandbox TaskOOM right now, so it is fine.
c.eventMonitor.startExitMonitor(context.Background(), id, task.Pid(), exitCh)
}containerd/process.go
// containerd/process.go 监控container exec等进程退出
func (p *process) Wait(ctx context.Context) (<-chan ExitStatus, error) {
c := make(chan ExitStatus, 1)
go func() {
defer close(c)
r, err := p.task.client.TaskService().Wait(ctx, &tasks.WaitRequest{
ContainerID: p.task.id,
ExecID: p.id,
})
if err != nil {
c <- ExitStatus{
code: UnknownExitStatus,
err: err,
}
return
}
c <- ExitStatus{
code: r.ExitStatus,
exitedAt: r.ExitedAt,
}
}()
return c, nil
}- containerd重新获取shim pid,与shimV1不同的是这里的shim pid并不是作为容器的ppid, 因此在容器进程无法正常kill时,不能通过kill shim pid来强制容器退出。
func (m *TaskManager) loadTasks(ctx context.Context) error {}
func loadShim()
func (s *shim) Connect(ctx context.Context) error {
response, err := s.task.Connect(ctx, &task.ConnectRequest{
ID: s.ID(),
})
if err != nil {
return err
}
s.taskPid = int(response.TaskPid) // 获取shim的pid
return nil
}containerd-kata-shim-v2代码分析
- ttrpc 服务端入口:
文件containerd-shim-v2/service.go中定义了containerd-kata-shim-v2作为ttrpc服务端监听来自容器引擎的ttrpc调用的入口函数并实现了容器退出状态的监控、io和信号转发等操作。
// service is the shim implementation of a remote shim over GRPC
type service struct {
mu sync.Mutex
eventSendMu sync.Mutex
// pid Since this shimv2 cannot get the container processes pid from VM,
// thus for the returned values needed pid, just return this shim's
// pid directly.
pid uint32
ctx context.Context
sandbox vc.VCSandbox
containers map[string]*container // pause和container容器全部保存在这里
config *oci.RuntimeConfig
events chan interface{}// publish使用 128缓冲
monitor chan error // 监控sandbox即虚机的状态
cancel func() // ctx cancel
ec chan exit // 保存了容器推出码 pid等信息, 32缓冲, shim中协程检查进程写入events,向上publish
id string// io.containerd.kata.v2
}- service 实现了ttrpc server和shim管理的接口
type TaskService interface {
State(ctx context.Context, req *StateRequest) (*StateResponse, error)
Create(ctx context.Context, req *CreateTaskRequest) (*CreateTaskResponse, error)
Start(ctx context.Context, req *StartRequest) (*StartResponse, error)
Delete(ctx context.Context, req *DeleteRequest) (*DeleteResponse, error)
Pids(ctx context.Context, req *PidsRequest) (*PidsResponse, error)
Pause(ctx context.Context, req *PauseRequest) (*google_protobuf1.Empty, error)
Resume(ctx context.Context, req *ResumeRequest) (*google_protobuf1.Empty, error)
Checkpoint(ctx context.Context, req *CheckpointTaskRequest) (*google_protobuf1.Empty, error)
Kill(ctx context.Context, req *KillRequest) (*google_protobuf1.Empty, error)
Exec(ctx context.Context, req *ExecProcessRequest) (*google_protobuf1.Empty, error)
ResizePty(ctx context.Context, req *ResizePtyRequest) (*google_protobuf1.Empty, error)
CloseIO(ctx context.Context, req *CloseIORequest) (*google_protobuf1.Empty, error)
Update(ctx context.Context, req *UpdateTaskRequest) (*google_protobuf1.Empty, error)
// 获取容器退出状态
Wait(ctx context.Context, req *WaitRequest) (*WaitResponse, error)
Stats(ctx context.Context, req *StatsRequest) (*StatsResponse, error)
// 获取shim pid
Connect(ctx context.Context, req *ConnectRequest) (*ConnectResponse, error)
// 取消全部context子任务并停止containerd-shim-kata-v2进程
Shutdown(ctx context.Context, req *ShutdownRequest) (*google_protobuf1.Empty, error)
}
// Shim server interface
type Shim interface {
shimapi.TaskService
Cleanup(ctx context.Context) (*shimapi.DeleteResponse, error)
StartShim(ctx context.Context, id, containerdBinary, containerdAddress string) (string, error)
}iSulad通过containerd-shim-kata-v2运行容器
- 启动pause容器。
isula run -tid --runtime io.containerd.kata.v2 --network none --annotation io.kubernetes.docker.type=podsandbox <pause-image> <command>此处获取pod的sandbox-id。
- 创建业务容器并加入到这个pod中
isula run -tid --runtime io.containerd.kata.v2 --network none --annotation io.kubernetes.docker.type=container --annotation io.kubernetes.sandbox.id=<sandbox-id> busybox <command>containerd通过containerd-shim-kata-v2运行容器
自行安装cri-tools工具,本文使用github.com上master分支编译安装。
- containerd配置:
containerd配置文件/etc/containerd/config.toml中增加如下一段用来配置kata参数
[plugins."io.containerd.grpc.v1.cri".containerd.runtimes]
//
[plugins."io.containerd.grpc.v1.cri".containerd.runtimes.kata]
runtime_type = "io.containerd.kata.v2"
pod_annotations = ["com.github.containers.virtcontainers.sandbox_cpu", "com.github.containers.virtcontainers.sandbox_mem", "com.github.containers.virtcontainers.static_devices", "com.github.containers.virtcontainers.sandbox_drivers", "com.github.containers.virtcontainers.boot_cgroup"]
container_annotations = ["com.github.containers.virtcontainers.storage_spec"]
//
[plugins."io.containerd.grpc.v1.cri".containerd.runtimes.runc]
base_runtime_spec = ""- 安装cni插件:
参考如下教程,自行编译plugins
https://github.com/containerd/containerd/blob/master/script/setup/install-cni- 指定runtime运行pod:
$ crictl -i unix:///var/run/containerd/containerd.sock -r unix:///var/run/containerd/containerd.sock runp --runtime kata sandbox-config.json
$ cat sandbox-config.json
{
"metadata": {
"name": "nginx-sandbox",
"namespace": "default",
"attempt": 1,
"uid": "hdishd83djaidwnduwk28bcsb"
},
"image": {
"image": "docker.io/library/busybox:latest"
},
"linux": {
}
}Author:高华涛






