海思机器人平台携手伙伴,亮相openEuler Summit 2023峰会
2023年12月15日至16日,openEuler Summit 2023峰会在北京召开,这是一场致力于推动操作系统产业发展的盛大峰会,聚焦推动操作系统技术不断创新,共建全球开源新生态。在本次大会上,海思携手多家合作伙伴,带来基于openEuler的机器人开发平台以及多样化解决方案。
[基于openEuler的多传感器融合机器人开发平台]
在这次峰会上,海思带来了基于openEuler的多传感器融合机器人开发平台,该方案在业界首次实现了将dToF、视觉在内的多传感器拼接与融合,同时结合海思领先的分布式异构计算、全场景联接、精准执行/表达/交互等技术,成为强大的机器人开发平台。峰会现场除了海思机器人开发平台和原型样机,还展示了合作伙伴基于海思平台开发的相关生态产品,包括微型固态激光雷达、多向固态激光雷达、短距星闪Wi-Fi通信模组、广域通信模组等,以及面向机器人、工业视觉、智能家居等场景的首款"欧拉派"开发板。

海思机器人开发平台具备强劲的智能化处理能力,包括高达10.4TOPS INT8的NPU、4xA55、高性能RISC-V CPU以及双核DSP等,可接入高达7路的dToF微型激光雷达传感器,以及4路摄像头输入,并具备4K60的高性能视频编解码能力,是一个以AI, CPU和媒体处理为核心,并提供丰富的接口可接入强大的边缘智能处理平台。
在强大的端侧算力加持下,海思机器人开发平台首次实现了基于dToF全向3D立体感知拼接避障方案,通过MIPI或USB接口将2-8路dToF固态激光雷达Sensor采集到的深度信息,通过SoC的强大算力实现校准算法、搜峰深度计算算法、温度补偿算法、 滤波算法、点云转换等算法计算,并进行点云动态拼接。再结合openEuler的异构计算能力,通过DSP进行点云动态去除地面等算法加速,可以快速识别目标障碍物,然后通过ROS2系统进行路径优化,实时避障等操作。

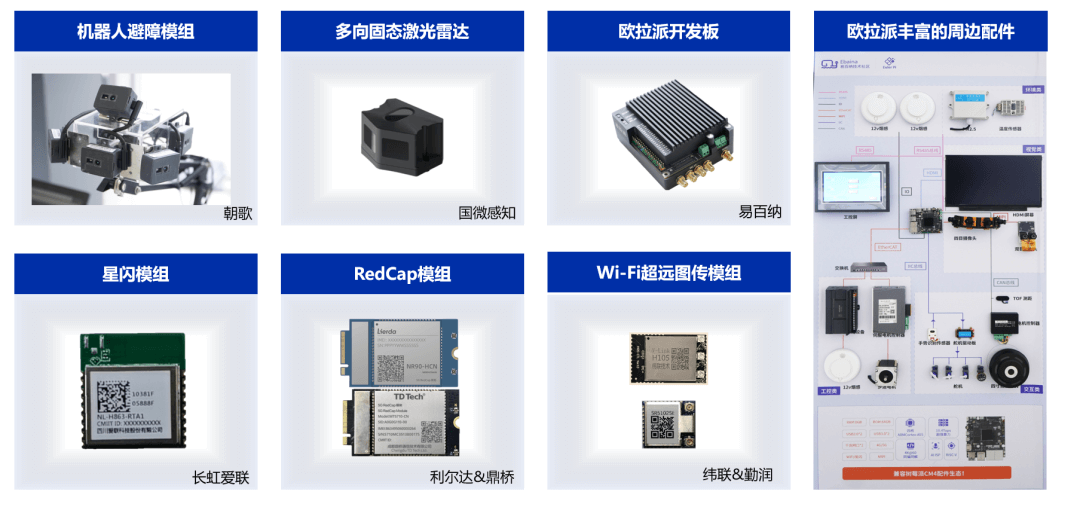
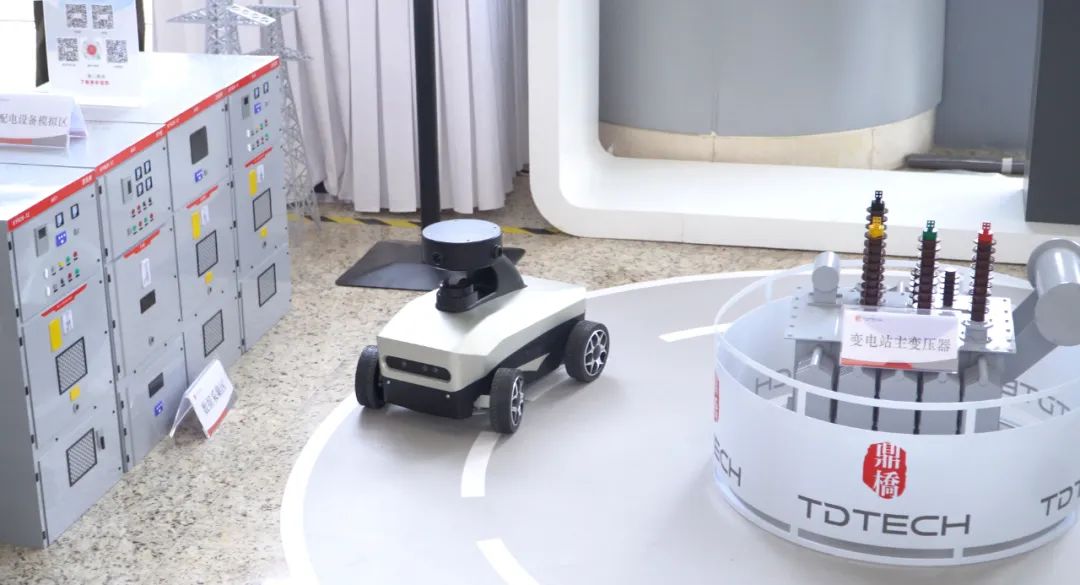
机器人是一个复杂的系统,海思秉承"众行远"的理念,与多家伙伴深入合作,围绕机器人开发平台推出了多品类的生态产品与配件:欧拉派首款开发板(易百纳)、机器人避障模组(朝歌)、多向固态激光雷达模组(国微感知)、Wi-Fi超远图传模组(纬联&勤润)、星闪模组(爱联)、RedCap模组(鼎桥&利尔达)。这一系列配套产品不仅满足多传感器融合机器人各个环节的需求,同时通过深度整合,使其相互协同工作,构建更加智能、高效的机器人体系。在峰会现场可以看到鼎桥等合作伙伴基于海思机器人平台开发的面向电力巡检场景的机器人小车。
[结语]
在机器人行业的未来发展中,我们预见更多创新的可能性。随着技术的不断演进,多传感器将使机器人将更智能,适应性更强,拥有更广泛的应用领域。从智慧家庭到工业制造,再到医疗保健,海思机器人平台将为各行各业提供创新解决方案基座,助力迈向数字化智慧社会。未来,我们将持续与开发者、行业伙伴共同努力,为未来创造更加美好的生活。
如果希望了解更多信息,可以观看openEuler峰会嵌入式论坛海思相关解决方案的精彩回放:https://hw.vhallyun.com/v2/watch/14128?lang=zh&thirdId=Ba&H&landScape=true






