首款搭载 openEuler 的 RISC-V 机器人小车解决方案落地

RISC-V 机器人小车亮相玄铁大会
3 月 14 日,由达摩院举办的 2024 玄铁 RISC-V 生态大会在深圳举行,来自中国科学院软件研究所、亚博智能和玄铁的 ROS 机器人小车解决方案在会上亮相。据悉,这款产品名为 RISC-V MicroROS,预计将在四月份由亚博智能公开发售。RISC-V MicroROS 是一款基于 Milk-V Meles 开发的 ROS2 智能机器人,搭载了玄铁 C910 处理器、openEuler(OpenAtom openEuler简称"openEuler") RISC-V 操作系统和亚博公司提供的外设解决方案。可以实现机器人运动控制、AI 视觉交互、SLAM 建图导航、多机同步控制等多项功能。中国科学院软件研究所主导的 RISC-V SIG 大力支持了 RISC-V MicroROS 智能小车的系统环境建设,提供了适配 TH1520 的 openEuler RISC-V 硬件镜像和硬件驱动,完善了 ROS2 在 RISC-V 硬件环境的软硬件生态适配。小车的成功落地也反向验证了 RISC-V SIG 在社区软件生态建设的成果。

ROS + RISC-V 的 openEuler 方案
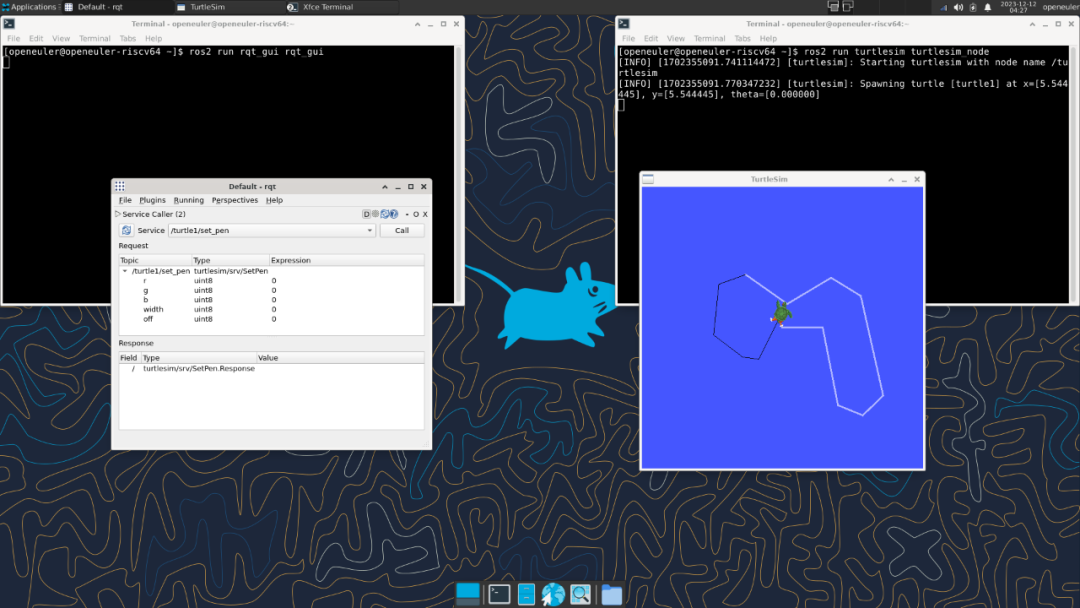
openEuler 的 ROS2 humble 工程由中国科学院软件研究所主导的 ROS SIG 引入 openEuler 社区,并且由 RISC-V SIG 进行移植和优化,成功为 openEuler RISC-V 系统赋能 ROS2 功能。此外,RISC-V SIG 与 ROS SIG 共同制定在 RISC-V 架构下的测试策略,充分进行了功能测试,保证了相关软硬件生态可以稳定运行。RISC-V SIG 的工程师从软件的角度,提供了一份基于 openEuler RISC-V 利用 ROS2 系统进行双机通信的 Demo 文档,为 ROS2 在 RISC-V 架构上的应用提供了实践指南。
测试文档:https://gitee.com/zhtianyu/ros-humble-work/tree/master/ros-humble-test/ROS-humble-oerv23.09-lpi4a
Demo 文档:https://gitee.com/zhtianyu/ros-humble-work/tree/master/ros-humble-demo
硬件优化工作
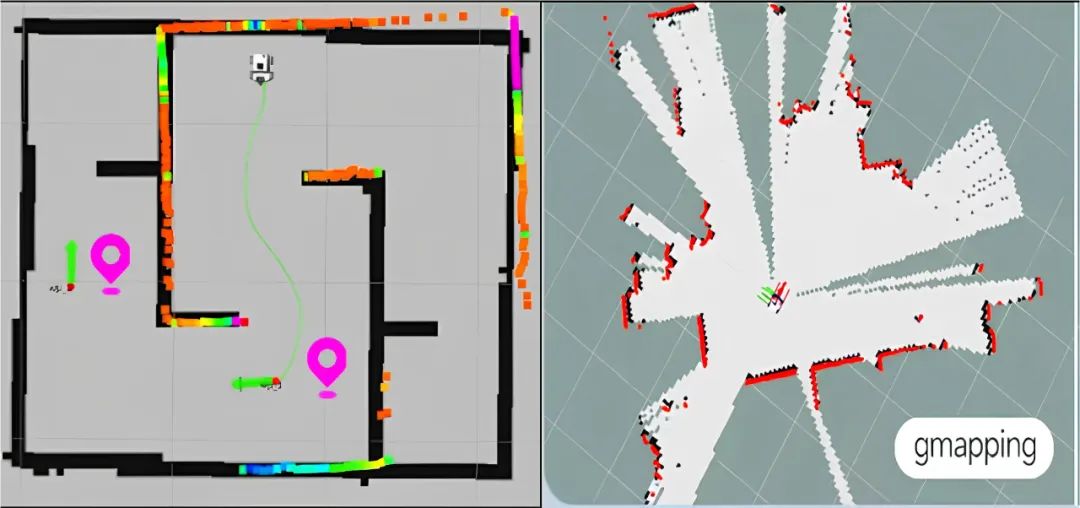
除了在上层软件层面,RISC-V SIG 也基于 TH1520 的外设驱动进行了一定的优化,包括利用 GPU、 NPU 和多媒体解码等多种硬件驱动加速图像采集解析,SLAM 建图渲染和多机同步网络响应。同时,RISC-V SIG 为 TH1520 的 openEuler 内核修复和开启了蓝牙和 Wi-Fi 等相应外设功能支持,使得 ROS2 系统拥有了一个功能齐全,稳定高效的运行环境。作为集成工作的一个重要成果,基于 TH1520 的 Meles 镜像专为 ROS 机器人开发和应用设计,提供了一个专用的 openEuler 系统镜像底座。这标志着国内首个基于 RISC-V 芯片与 openEuler 系统,并针对教育机器人开发厂商的生产解决方案形成。
未来规划
为了进一步推动 openEuler RISC-V 生态建设发展,稳固 openEuler RISC-V 作为全栈应用的系统底座,RISC-V SIG 计划将在下面几个方向继续投入:
基于 openEuler 24.03 版本的适配工作,为各种软件栈提供可靠的流水线测试,与手工验证。
探索openEuler 在 RISC-V 上的最优应用生态,进一步拓展 openEuler RISC-V 的落地场景。
基于系统的维度,RISC-V SIG 对 openEuler RISC-V 不断进行软件优化与硬件优化,打造可靠的全栈场景 RISC-V 系统基座。
加入我们
我们相信 RISC-V 已经是趋势,RISC-V 将无处不在,无论是如意 Book 笔记本电脑还是 RISC-V MicroROS 机器人,都证明了 RISC-V 在高性能领域的应用生态已经迈开脚步。如果您对 RISC-V 感兴趣,欢迎联系下方的微信加入 RISC-V SIG 交流群,讨论更多关于 RISC-V 的更多内容,为推动 openEuler & RISC-V 生态贡献力量!
中科院软件所王经纬







